cuda-mppi
Overview
cuda-mppi is a high-performance, GPU-accelerated library for Model Predictive Path Integral (MPPI) control. It provides a flexible C++ core with Python bindings, designed to serve as the backend for advanced autonomous navigation and control research.
This repository is currently in active development. It should not be used for production purposes.
Key Features
- Speed: Pure CUDA implementation capable of evaluating thousands of trajectories in parallel at hundreds of Hz.
- Flexibility: Template-based architecture allows for zero-overhead swapping of Dynamics and Cost functions.
- Multiple variants: Standard MPPI, Smooth MPPI (S-MPPI), Kernel MPPI (K-MPPI), B-Spline MPPI, and Informative MPPI (I-MPPI) — all exposed to Python.
- JIT Compilation: Define dynamics and cost in C++/CUDA strings; the library compiles a
.cubinat runtime via NVRTC. - Pixi environment: reproducible builds pinned through a conda-forge lock file.
Performance snapshot
Lemniscate tracking, 30 s, K=900 rollouts, N=40, dt=0.02 s:
| Controller | RMSE (m) | Compute / step |
|---|---|---|
| MPPI | 0.60 | 0.17 ms |
| K-MPPI | 0.79 | 0.03 ms |
| S-MPPI | – (#30) | – |
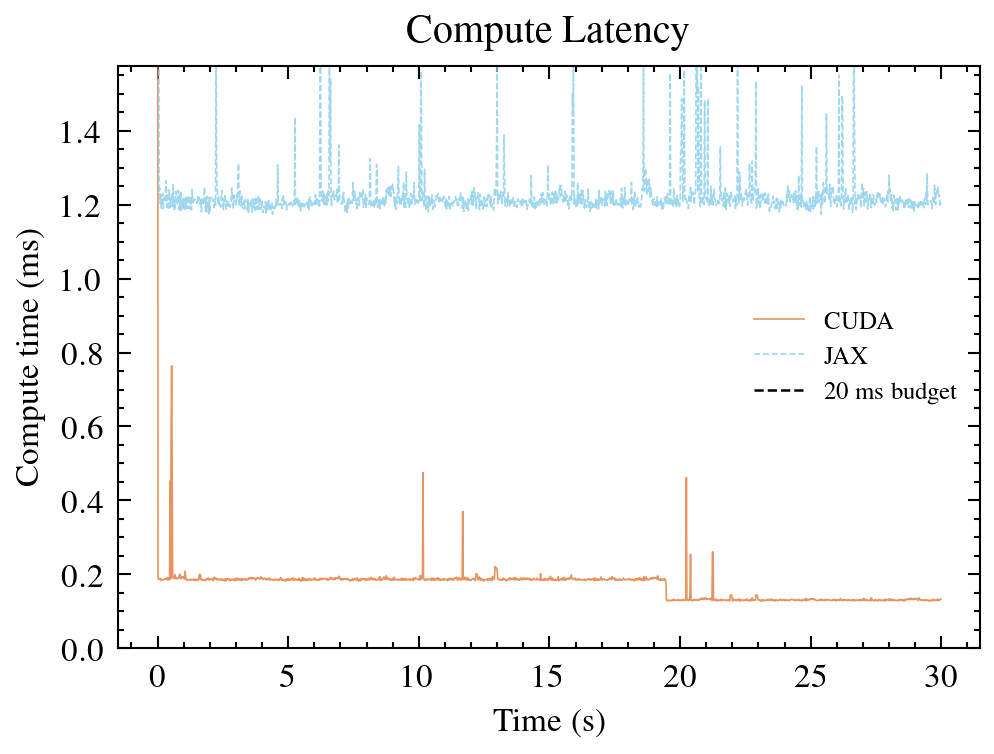
JAX vs CUDA MPPI
Same algorithm, same GPU, different stack. Both run quadrotor lemniscate tracking with identical parameters.
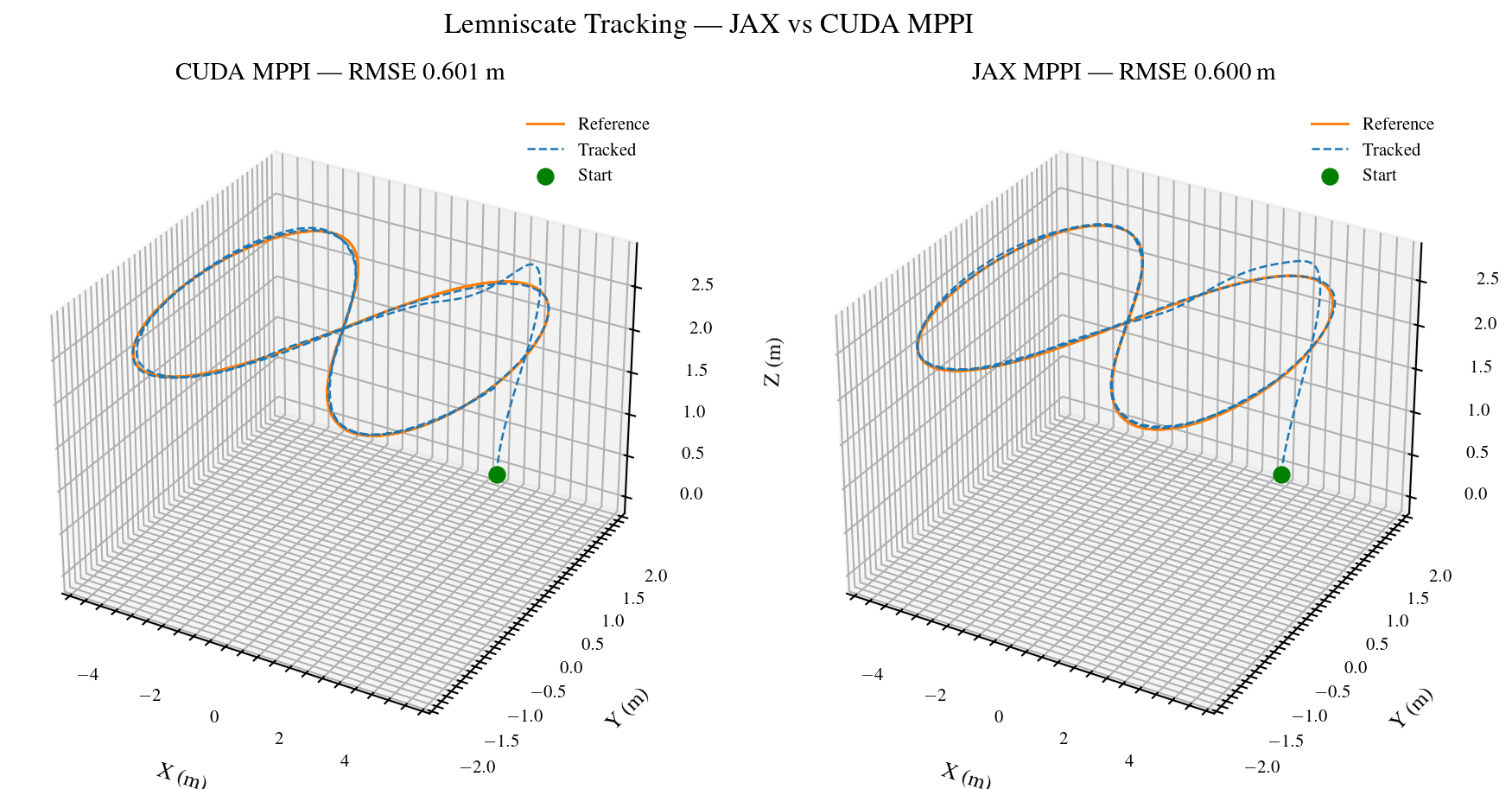
Reproduce with:
pixi run python scripts/bench_jax_mppi.py --compare --plotDocumentation Structure
Getting Started
Installation instructions for C++ standalone usage and Python integration.
Core Concepts
Understanding the architecture, memory model, and JIT Compilation.
Controllers
Detailed theoretical derivation and usage of the reactive tracking controllers.
Planners
Documentation for the Informative-MPPI (I-MPPI) exploration planner.
API Reference
Python API documentation for cuda_mppi.
License
MIT License.